4. Lois de comportement pour les bétons
La liste suivante concerne les lois de comportement pour le béton.
4.1. Modèle de Mazars
'MAZARS' : Modele d'endommagement scalaire pour le béton (bien adapté aux chargements monotones).
4.1.1. Description
La loi de comportement élastique endommageable en traction/compression selon le modèle de Mazars, corrigé pour prendre en compte de manière plus réaliste l'endommagement en cisaillement, est présentée dans [MAZARS-1984] [MAZARS-1986] [PIJAUDIER-1991].
Caracteristiques et limitations principales :
Dans ce modèle la dégradation des propriétés élastiques du matériau est représentée à l'aide d'une variable scalaire \(D\) variant entre zéro (matériau sain) et l'unité (matériau totalement endommagé). Cette dernière est obtenue par la combinaison de deux variables scalaires représentant l'endommagement sous sollicitations de compression et de traction séparément ;
Cela permet de modéliser convenablement la dyssimétrie traction-compression observée expérimentalement pour les bétons. Cependant, aucune reprise de raideur induite par la refermeture des fissures lors du passage d'une sollicitation de traction à une sollicitation de compression ne peut être prise en compte, c'est-à-dire que l'effet unilatéral n'est pas modélisé ;
Compte tenu de cela, cette loi est adaptée à la simulation de la réponse du béton sous chargement monotone, mais nécessite des modifications pour une utilisation dans le cadre d'un calcul sous sollicitations cycliques et/ou dynamiques. Dans ce dernier cas, des limitations supplémentaires sont présentes (par exemple, l'impossibilité de modéliser des boucles d'hystérésis).
4.1.2. Formulation du modèle
La relation contrainte-déformation s'écrit :
où \(\boldsymbol{\sigma}\) est le tenseur des contraintes de Cauchy, \(\boldsymbol{\varepsilon}\) est le tenseur des déformations infinitésimales, et \(\mathbb{E}\) est le tenseur d'élasticité d'ordre 4.
La variable d'endommagement évolue au cours du chargement en fonction du critère d'endommagement :
où \(e\) est une mésure scalaire du tenseur de déformation et \(\kappa\) est une variable d'histoire fournissant le maximum atteint par la déformation équivalente pendant le chargement du matériau.
Selon la formulation proposée par Mazars, la déformation équivalente est définie par :
où \(\langle\boldsymbol{\varepsilon}\rangle\) est la partie positive du tenseur des déformations, \(\epsilon_{i}\) est la i-ème déformation principale, \(\langle\cdot\rangle_+\) est l'opérateur de Macaulay, et \(n\) répresente la dimension du problème consideré.
La variable d'histoire \(\kappa\) est donc définie par :
avec \(e_0\) une valeur seuil initiale et \(t\) une variable répresentant le temps (ou bien le pseudo-temps dans un calcul quasi-statique).
L’évolution de cette surface de charge doit respecter les conditions Kuhn-Tucker :
En d'autres termes, la surface de charge ne peut croître que si le seuil de déformation actuel est dépassé. Cela implique que l'endommagement ne progresse pas pendant les phases de décharge ou les phases de charge où les niveaux de déformation sont inférieurs au maximum atteint précédemment au cours de l'historique du chargement.
Pour prendre en compte la nature fortement dissymétrique du comportement en traction et en compression du béton, Mazars introduit deux fonctions \(D_t\) et \(D_c\) représentant respectivement les dégradations en traction et compression. Elles sont définies comme suit :
avec \(A_{t(c)}\) et \(B_{t(c)}\) les quatre paramètres additionnels permettant de définir, avec le seuil de première fissuration en traction \(e_0\), les lois d'évolution de l'endommagement en traction (t) et en compression (c). Le paramètre \(A_{t(c)}\) permet de controler la contrainte résiduelle en traction (respectivement compression) uniaxiale tandis que le paramètre \(B_{t(c)}\) contrôle la forme de la loi d'evolution de l'endommagement dans la phase post pic de contrainte.
La variable d'endommagement \(D\) est finalement obtenue par combinaison linéaire des variables \(D_{t}\) et \(D_{c}\) comme suit :
avec \(\alpha_{t(c)} \in [0,1]\) des facteurs de combinaison qui s'expriment en fonction des déformations principales comme suit :
avec \(\varepsilon_i^t\) les déformations associées aux contraintes principales positives. Le paramètre \(\beta\) a été introduit historiquement plus tard dans le modèle pour éviter une évolution trop rapide de l'endommagement en cisaillement [PIJAUDIER-1991].
4.1.2.1. Réponses typiques
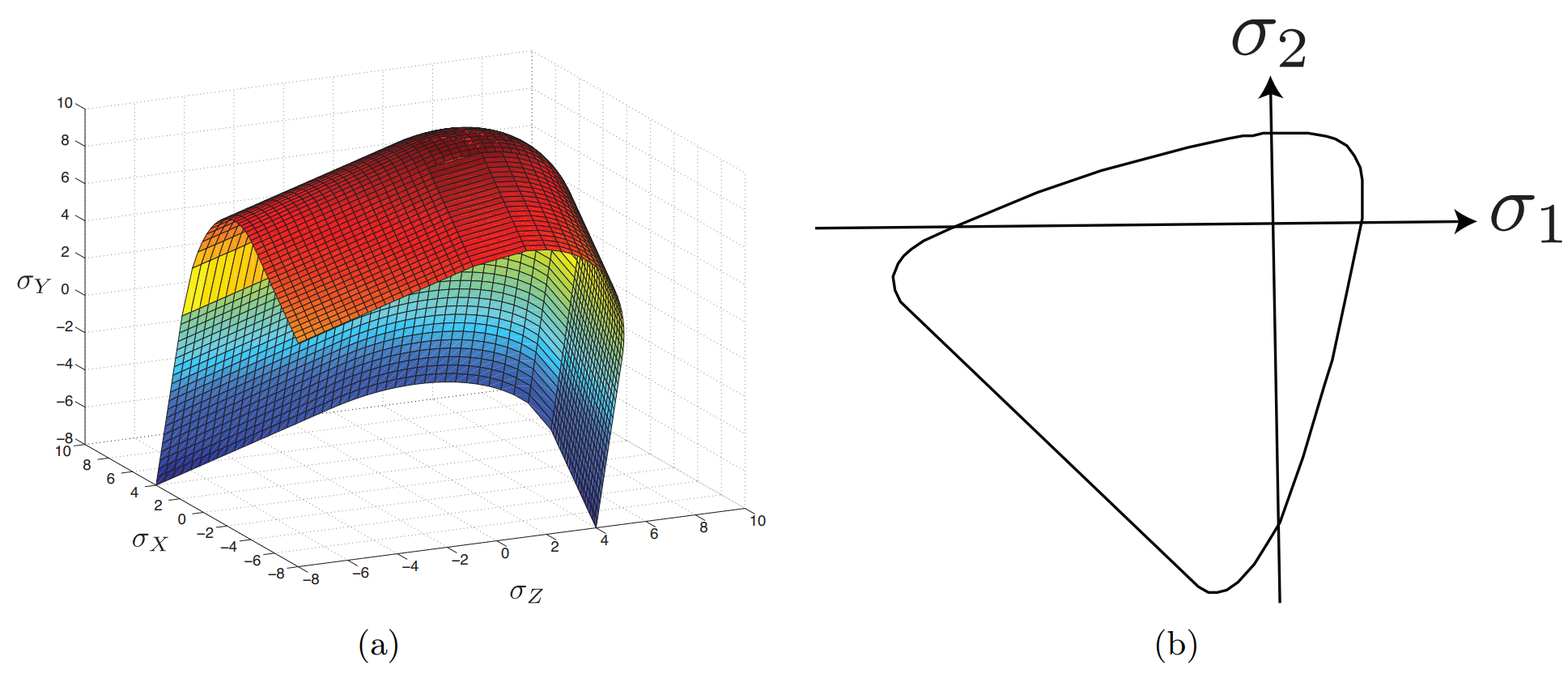
Critère de Mazars. (a) Surface seuil dans l'espace des contraintes. (b) Trace dans le plan \(\sigma_3=0\). Giry 2001.
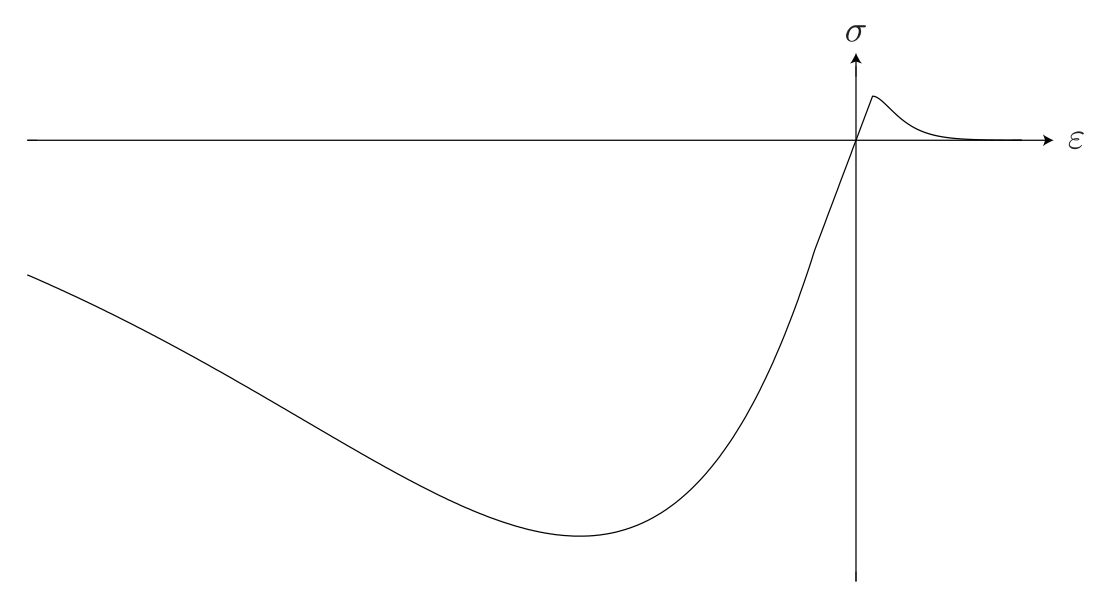
Loi contrainte - déformation pour une sollicitation uniaxiale.
4.1.2.2. Quelques commentaires
Grâce à sa simplicité et sa robustesse, ce modèle a été et est encore largement utilisé pour modéliser le comportement du béton. Certaines pathologies peuvent néanmoins être citées et pour lesquelles des développements sont à considérer :
Le modèle présente une fragilité excessive dans son comportement en cisaillement et l'introduction du paramètre \(\beta\) pour atténuer cet effet entraîne une reprise de rigidité à des niveaux de déformation élevés ;
Le modèle ne prend pas en compte l'effet unilatéral, c'est-à-dire une reprise de raideur due à la refermeture des fissures expérimentalement observée. En conséquence, le modèle ne parvient pas à reproduire correctement le comportement sous chargements cycliques ;
En termes numériques, l'utilisation de l'opérateur de Macaulay dans l'expression des coefficients \(\alpha_{t(c)}\) entraîne une dérivée non définie de ceux-ci en zéro. Cela empêche ainsi l'utilisation de l'opérateur tangent dans le schéma de résolution. Par conséquent, seul l'opérateur sécant est utilisé, ce qui limite la vitesse de convergence du schéma de résolution ;
Le caractère isotrope de l’endommagement ne permet pas de bien suivre l’évolution des nonlinéarités pour des chargements non radiaux.
4.1.3. Implémentation Cast3M (esope)
Dans la suite, nous détaillons les étapes du calcul pour les éléments volumiques (sources cmazar.eso) d'une part et pour les éléments poutres à fibres (sources fibmaz.eso) d'autre part, en mettant l'accent sur les parties de code correspondantes aux aspects théoriques mentionnés précédemment. Pour une analyse détaillée de l'implémentation et des aspects plus strictement techniques concernant la signification des variables, veuillez vous référer aux commentaires présents dans les fichiers sources.
4.1.3.1. Implémentation pour les éléments volumiques
L'implémentation est réalisée dans le fichier source cmazar.eso
1C CMAZAR SOURCE MB234859 25/03/18 21:15:01 12209 2 SUBROUTINE CMAZAR (WRK52,WRK53,WRK54,WRKK2,NSTRS1,NVARI, 3 1 ICARA,JDIM,IFOUR2)
4.1.3.1.1. Entrées
10C WRK0 pointeur sur un segment deformation au pas precedent 11C 12C WRK1 pointeur sur un segment increment de deformation 13C 14C WRKK2 pointeur sur un segment variables internes au pas precedent 15C 16C WRK5 pointeur sur un segment de deformations inelastiques 17C 18C XMATER constantes du materiau 19C 20C NSTRS1 nombre de composantes dans les vecteurs des contraintes 21C et les vecteurs des deformations 22C 23C NVARI nombre de variables internes (doit etre egal a 2) 24C 25C NMATT nombre de constantes du materiau 26C 27C ISTEP flag utilise pour separer les etapes dans un calcul non local 28C ISTEP=0 -----> calcul local 29C ISTEP=1 -----> calcul non local etape 1 on calcule les seuils 30C ISTEP=2 -----> calcul non local etape 2 on continue le calcul 31C a partir des seuils moyennes35C JDIM Dimension de travail 36C ( Coques JDIM =2 , Massifs JDIM = IDIM ) 37C IFOUR2 Type de formulation 38C ( Coques IFOUR2 = -2 => contraintes planes , 39C Massifs IFOUR2 = IFOUR)
4.1.3.1.2. Sorties
43C VARINF variables internes finales 44C 45C SIGMAF contraintes finales
4.1.3.1.3. Algorithme
Le calul de l'endommagement est réalisé par une procédure purement explicite.
On calcule la déformation totale au niveau du point d'intégration ;
On calcule le tenseur des déformations principales ;
On calcule la matrice d'élasticite et les contraintes principales ;
On calcule la déformation équivalente de Mazars :
Si le calcul est local (ISTEP = 0), la déformation principale est évaluée directement sur la base des déformations principales ;
En cas d'un calcul non-local, l'évolution de l'endommagement est pilotée par la contrepartie non-locale de la déformation de Mazars. Celle-ci est évaluée avec deux passages dans la loi de comportement :
Lors du premier passage (ISTEP = 1), on calcule la déformation locale et on sort de la loi de comportement. La déformation non-locale est calculée via une procédure ad-hoc en dehors de la loi de comportement, par exemple, via une méthode non-locale intégrale ou bien une formulation de type gradient implicite ;
Cette déformation non-locale est une variable d'entrée de la loi de comportement (ISTEP = 2) et est utilisée pour faire évoluer l'endommagement ;
On vérifie le dépassement du seuil de déformation. Si le seuil n'est pas dépassé, l'endommagement n'est pas mis à jour. Sinon, on procède comme suit.
On calcule les coefficients \(\alpha_{t(c)} \in [0,1]\). Pour cela :
On calcule le signe des contraines elastiques de compression SIGPC(i) (négative) et de traction SIGPT(i) (positive) et les traces associées :
184 DO 300 ISTRS=1,3 185 IF (SIGP(ISTRS).LT. XZERO) THEN 186 SIGPC(ISTRS)=SIGP(ISTRS) 187 SIGPT(ISTRS)=XZERO 188 ELSE 189 SIGPT(ISTRS)=SIGP(ISTRS) 190 SIGPC(ISTRS)=XZERO 191 END IF 192300 CONTINUE 193 TRSIGT=SIGPT(1)+SIGPT(2)+SIGPT(3) 194 TRSIGC=SIGPC(1)+SIGPC(2)+SIGPC(3)
On calcule les déformations associées aux contraintes positives \(\varepsilon_i^t\) :
198 DO 400 ISTRS=1,3 199 EPSILT(ISTRS)=(SIGPT(ISTRS)*(UN+XNU)-TRSIGT*XNU)/YOUN 200400 CONTINUE
On calcule \(\alpha_{t}\) puis on en déduit \(\alpha_{c}\) :
204 ALFAT = MAX(XZERO,EPSIPP(1))*EPSILT(1) + 205 1 MAX(XZERO,EPSIPP(2))*EPSILT(2) + 206 2 MAX(XZERO,EPSIPP(3))*EPSILT(3) 207 ALFAT = ALFAT/(EPSTIL*EPSTIL) 208 ALFAC = UN - ALFAT
On corrige les paramètres de combinaison linéaire via le coefficient \(\beta > 1\) pour amémiorer la réponse en cisaillement :
221 IF (BETA .GT. UN) THEN 222 IF ( ALFAT .GT. XPETIT ) THEN 223 ALFAT=ALFAT**BETA 224 END IF 225 IF ( ALFAC .GT. XPETIT ) THEN 226 ALFAC=ALFAC**BETA 227 END IF 228 END IF
On corrige la déformation equivalente de Mazars \(e\) par le coefficient \(\gamma\) pour améliorer la réponse en bi ou tri-compression :
\[e = e \gamma\]le coefficient \(\gamma\) est calculé de la façon suivante :
\[\gamma = -\frac{\sqrt{\sum_{i=1}^n \langle \sigma_i \rangle_{-}^2}}{\sum_{i=1}^n \langle \sigma_i \rangle_{-}}\]avec \(\langle \cdot \rangle_{-}\) l'opérateur partie négative.
212 IF (TRSIGC.LT. -YPETIT .AND. TRSIGT.LT.YPETIT) THEN 213 GAMMA=SIGPC(1)*SIGPC(1)+SIGPC(2)*SIGPC(2)+ 214 1 SIGPC(3)*SIGPC(3) 215 GAMMA=-SQRT(GAMMA)/TRSIGC 216 EPSTIM=EPSTIM*GAMMA 217 END IF
Le calcul de la variable d'endommagement D est effectué après avoir vérifié si le seuil de dommage initial a été dépassé. Cette vérification est nécessaire car il est possible que la valeur de la déformation equivalente de Mazars ait été multipliée par \(\gamma\). Tandis que l'évolution du dommage en compression DC suit le modèle de Mazars classique, trois lois d'évolution différentes du dommage en traction DT sont proposées selon la valeur du paramètre ATRA :
ATRA > 0 : modèle de mazars classique ;
-10 < ATRA < 0 : loi d'évolution exponentielle modifiée pour prendre en compte l'énergie de fissuration \(G_{f}\) via le paramètre BTRA ;
ATRA < -10 : loi d'évolution linéaire. Le paramètre BTRA représente alors la déformation pour laquelle la contrainte s'annule.
252 IF (EPSTIM .GT. EPSD0) THEN 253 IF (ATRA .GT. 0.D0) THEN 254 DT=UN - EPSD0*(UN-ATRA)/EPSTIM - 255 1 ATRA*EXP(BTRA*(EPSD0-EPSTIM)) 256 ELSE IF (ATRA . GT. -10.) THEN 257 DT=UN - epsd0/epstim*EXP(BTRA*(EPSD0-EPSTIM)) 258 ELSE 259 IF(EPSTIM .LT. BTRA) THEN 260 DT=UN - EPSD0*(BTRA - EPSTIM)/EPSTIM/(BTRA - EPSD0) 261 ELSE 262 DT=1.D0 263 ENDIF 264 END IF 265 DC=UN - EPSD0*(UN-ACOM)/EPSTIM - 266 1 ACOM*EXP(-BCOM*(EPSTIM-EPSD0)) 267 ELSE 268 269 DT=XZERO 270 DC=XZERO 271 END IF 272 D = ALFAT*DT + ALFAC*DC
La variable d'endommagement est ensuite bornée supérieurement à 0.99999999 afin d'éviter un trop mauvais conditionnement de la matrice de rigidité ;
On calcule la nouvelle contrainte et on sort de la loi de comportement ;
Les données de sortie sont la contrainte et les variables internes mises à jour.
4.1.3.2. Implémentation pour les éléments poutres à fibres
L'implémentation est réalisée dans le fichier source fibmaz.eso.
1C FIBMAZ SOURCE MB234859 24/07/09 21:15:03 11959 2 SUBROUTINE FIBMAZ (XMAT,DEPS,SIG0,VAR0,SIGF,VARF)
4.1.3.2.1. Entrées
14C XMAT : Caracteristique du materiaux 15C 16C EPS : Deformations initiales 17C 18C DEPS : Increment de deformations 19C 20C SIG0 : Contraintes initiales 21C 22C VAR0 : Variables internes initiales
4.1.3.2.2. Sorties
27C SIGF : Contraintes finales 28C 29C VARF : Variables internes finales
4.1.3.2.3. Algorithme
Le calul de l'endommagement est réalisé selon la même méthode que celle décrite précédemment dans le fichier source cmazar.eso pour les éléments volumiques, dans la mesure où il s'appuie sur la formulation 3D complète du modèle de Mazars.
On calcule la déformation totale au niveau du point d'intégration ;
On calcule les terme de la matrice 3x3 de déformation à partir de la théorie des poutres de Timoshenko ;
65 EPS33(1,1) = VARF(3) 66 EPS33(1,2) = (VARF(4)/2.D0) 67 EPS33(2,1) = EPS33(1,2) 68 EPS33(1,3) = (VARF(5)/2.D0) 69 EPS33(3,1) = EPS33(1,3) 70 EPS33(2,2) = ((-1.D0*XNU)*VARF(3)) 71 EPS33(3,3) = EPS33(2,2) 72 EPS33(3,2) = XZERO 73 EPS33(2,3) = XZERO
On calcule le tenseur des déformations principales ;
On calcule les contraintes principales à partir des déformations principales de de la matrice de Hook 3D (cas général) ;
86 SIGP(1)=((UN-XNU)*EPSIPP(1)+ 87 1 (XNU*EPSIPP(2))+ 88 2 (XNU*EPSIPP(3))) 89 SIGP(2)=((UN-XNU)*EPSIPP(2)+ 90 1 (XNU*EPSIPP(1))+ 91 2 (XNU*EPSIPP(3))) 92 SIGP(3)=((UN-XNU)*EPSIPP(3)+ 93 1 (XNU*EPSIPP(2))+ 94 2 (XNU*EPSIPP(1))) 95 DO 200 ISTRS=1,3 96 SIGP(ISTRS)=(SIGP(ISTRS)*YOUN/((UN+XNU)*(UN-2.D0*XNU))) 97200 CONTINUE
On calcule la déformation équivalente de Mazars en se plaçant toujours dans le cas où le calcul est local (ISTEP = 0). En conséquence, elle est évaluée directement sur la base des déformations principales ;
102 EPSTIL=MAX( XZERO , EPSIPP(1) )**2 + 103 1 MAX( XZERO , EPSIPP(2) )**2 + 104 2 MAX( XZERO , EPSIPP(3) )**2 105 EPSTIL=SQRT (EPSTIL) 106C 107C on est toujours dans le cas istep=0 108C 109 EPSTIM=EPSTIL 110 VARF(1)=EPSTIL
On calcule les coefficients \(\alpha_{c(t)} \in [0,1]\). Pour cela :
On calcule le signe des contraines elastiques de compression SIGPC(i) (négative) et la trace associée :
120 DO 300 ISTRS=1,3 121 SIGPC(ISTRS)=MIN(XZERO,SIGP(ISTRS)) 122300 CONTINUE 123 TRSIGC=SIGPC(1)+SIGPC(2)+SIGPC(3)
On vérifie le dépassement du seuil de déformation. Si le seuil n'est pas dépassé, l'endommagement n'est pas mis à jour. Sinon, on procède comme suit ;
On calcule les déformations associées aux contraintes négatives \(\varepsilon_i^c\) :
142 DO 400 ISTRS=1,3 143 EPSILC(ISTRS)=(SIGPC(ISTRS)*(UN+XNU)-TRSIGC*XNU)/YOUN 144400 CONTINUE
On calcule \(\alpha_{c}\) puis on en déduit \(\alpha_{t}\) :
148 ALFAC = MAX(XZERO,EPSIPP(1))*EPSILC(1) + 149 1 MAX(XZERO,EPSIPP(2))*EPSILC(2) + 150 2 MAX(XZERO,EPSIPP(3))*EPSILC(3) 151 ALFAC = ALFAC/(EPSTIL*EPSTIL) 152 ALFAT = UN - ALFAC
On corrige les paramètres de combinaison linéaire via le coefficient \(\beta > 1\) pour amémiorer la réponse en cisaillement :
156 IF (BETA .GT. UN) THEN 157 IF ( ALFAT .GT. XPETIT ) THEN 158 ALFAT=ALFAT**BETA 159 END IF 160 IF ( ALFAC .GT. XPETIT ) THEN 161 ALFAC=ALFAC**BETA 162 END IF 163 END IF
A noter que la correction \(\gamma\) en cas de bi ou tri-compression n'a pas de sens avec la modélisation poutre à fibres qui ne traite que des chargements de type traction-compression dans la direction de sa fibre neutre et cisaillement dans le plan de sa section.
Le calcul de la variable d'endommagement D est effectué en ayant vérifié au préalable si le seuil de dommage initial a été dépassé. L'évolution du dommage en compression DC comme celle du dommage en traction DT suivent le modèle de Mazars classique :
169 DT=UN - EPSD0*(UN-ATRA)/EPSTIM - 170 1 ATRA*EXP(BTRA*(EPSD0-EPSTIM)) 171 DC=UN - EPSD0*(UN-ACOM)/EPSTIM - 172 1 ACOM*EXP(BCOM*(EPSD0-EPSTIM)) 173 D = ALFAT*DT + ALFAC*DC
La variable d'endommagement est ensuite bornée supérieurement à 0.99999 afin d'éviter un trop mauvais conditionnement de la matrice de rigidité ;
On calcule la nouvelle contrainte et on sort de la loi de comportement ;
Les données de sortie sont la contrainte et les variables internes mises à jour.
4.1.4. Implémentation MFront
Une implémentation du modèle de Mazars a été réalisée sous MFront par Elian Dussart lors de son stage (2025) dans le cadre du Pôle de Compétences du SEMT. Elle s'inspire du fichier source cmazar.eso utilisé dans Cast3M et reprend la formulation originale de l'endommagement de Mazars sans régularisation mais avec les améliorations de la réponse du modèle en cisaillement et en situation de bi ou tri-compression [DUSSART-2025].
1//********************************************************************** 2 3@DSL Default; 4@Behaviour Mazars; 5@Author Elian Dussart; 6@Date 03 / 06 / 2025; 7@Description { 8 Loi de comportement de Mazars. 9} 10 11@UnitSystem SI; 12 13//********************************************************************** 14//********** Material properties to be entered in Cast3M *************** 15 16@MaterialProperty stress young; 17young.setGlossaryName("YoungModulus"); 18@MaterialProperty real nu; 19nu.setGlossaryName("PoissonRatio"); 20 21@MaterialProperty real acomp; 22@MaterialProperty real bcomp; 23@MaterialProperty real atrac; 24@MaterialProperty real btrac; 25@MaterialProperty real beta; 26@MaterialProperty real epsd0; 27 28//********************************************************************** 29//***************** State (internal) variables ************************* 30//********(updated during calculations and outputted)******************* 31 32//@AuxiliaryStateVariable : donnée interne du modèle sauvegardée pendant le pas de temps, permettant d'utiliser la version actualisée dans le pas de temps courant. 33@AuxiliaryStateVariable real d; // Damage variable (scalar) 34d.setGlossaryName("Damage"); 35@StateVariable real dcom ; 36dcom.setEntryName("EndommagementCompression") ; 37@StateVariable real dtra ; 38dtra.setEntryName("EndommagementTraction") ; 39@StateVariable real alft ; 40alft.setEntryName("ZoneTraction") ; 41@StateVariable real alfc ; 42alfc.setEntryName("ZoneCompression") ; 43 44//********************************************************************** 45//********************** Local variables ******************************* 46 47@LocalVariable real epstim; 48@LocalVariable real gamma; 49@LocalVariable real eto_tild; 50@LocalVariable real Zero; 51@LocalVariable real Un; 52@LocalVariable real Deux; 53@LocalVariable real X_Petit; 54@LocalVariable real Y_Petit; 55@LocalVariable real D_Borne; // maximum endommagement numérique utilisé 56@LocalVariable real lambda; // constante de Lamé 57@LocalVariable real mu; // constante de Lamé 58@LocalVariable stensor<3, stress> sig_p; // contraintes principales 59@LocalVariable stensor<3, stress> spt; 60@LocalVariable stensor<3, stress> spc; 61@LocalVariable stensor<3, strain> eto_t; 62 63//********************************************************************** 64//******** Initialization of Lamé's Constants & Initial Damage ********* 65 66@InitializeLocalVariables { 67 lambda = computeLambda(young, nu); 68 mu = computeMu(young, nu); 69 D_Borne = 1. - 1.e-8; 70 Zero = 0.; 71 Un = 1.; 72 Deux = 2.; 73 X_Petit = 1.e-12; 74 Y_Petit = 1.; 75} 76 77//********************************************************************** 78//************ Constitutive model integrator (explicit) **************** 79 80@Integrator { 81 82 const auto e = eval(eto + deto); // Calcul de la déformation totale 83 84 strain e1, e2, e3; 85 stress sp1, sp2, sp3; 86 87 constexpr auto esolver = Stensor::FSESJACOBIEIGENSOLVER; //Déclaration du solver utilisé 88 89 e.template computeEigenValues<esolver>(e1, e2, e3); //Calcul des déformations principales 90 91 const auto sig_tilde = eval(lambda * trace(e) * Stensor::Id() + 2 * mu * e); //récupération des contraintes liées à la déformation calculée. 92 93 sig_tilde.template computeEigenValues<esolver>(sp1, sp2, sp3); // Calcul des contraintes principales 94 95 sig_p = {sp1, sp2, sp3, stress(0), stress(0), stress(0)}; // Définition du tenseur de contrainte 96 97 eto_tild = sqrt(pow(max(Zero, e1), 2) + pow(max(Zero, e2), 2) + pow(max(Zero, e3), 2)); // Calcul de la déformation équivalente 98 99 eto_tild = max(X_Petit, eto_tild); 100 epstim = max(X_Petit, eto_tild); 101 // Deux variables différentes car la variable epstim peut changer pour la bi ou tri-compression 102 103 //Pour les calculs structurels, vérification de la condition de déformation (évite des calculs inutiles) 104 if (epstim >= epsd0) { 105 // Calcul du signe des contraintes élastiques 106 for (size_t i = 0; i != 3; i++) { 107 if (sig_p(i) < 0) { 108 spc(i) = sig_p(i); 109 spt(i) = Zero; 110 } else { 111 spc(i) = Zero; 112 spt(i) = sig_p(i); 113 } 114 } 115 const auto tr_spc = trace(spc); 116 const auto tr_spt = trace(spt); 117 118 // Calcul des deformations dues aux contraintes positives 119 for (size_t i = 0; i != 3; i++) { // déformation traction 120 eto_t(i) = (spt(i) * (Un + nu) - tr_spt * nu) / young; 121 } 122 123 // Déduction alft et alfc 124 alft = (max(Zero, e1) * eto_t(0) + max(Zero, e2) * eto_t(1) + 125 max(Zero, e3) * eto_t(2)) / 126 (pow(eto_tild, 2)); 127 alfc = Un - alft; 128 129 // Modification pour la bi ou tri-compression 130 if ((tr_spc < -Y_Petit) && (tr_spt < Y_Petit)) { 131 gamma = -sqrt(pow(spc(0), 2) + pow(spc(1), 2) + pow(spc(2), 2)) / tr_spc; 132 epstim *= gamma; 133 } 134 135 // Amélioration de la réponse en cisaillement pour beta > 1 136 if (beta > Un) { 137 if (alft > X_Petit) { 138 alft = pow(alft, beta); 139 } 140 if (alfc > X_Petit) { 141 alfc = pow(alfc, beta); 142 } 143 } 144 145 // Calcul de dtra et dcom 146 // Endommagement Mazars classique (at > 0) 147 if (epstim >= epsd0) { 148 dtra = Un - epsd0 * (Un - atrac) / epstim - atrac * exp(btrac * (epsd0 - epstim)); 149 dcom = Un - epsd0 * (Un - acomp) / epstim - acomp * exp(-bcomp * (epstim - epsd0)); 150 } else { 151 dtra = Zero; 152 dcom = Zero; 153 } 154 155 //Calcul de l'endommagement d 156 if(alft * dtra + alfc * dcom > d) { 157 d = alft * dtra + alfc * dcom; 158 d = min(d, D_Borne); 159 } 160 } else { 161 d = max(d, Zero); 162 } 163 164 // Calcul des contraintes finales 165 sig = (1 - d) * sig_tilde; 166 167} 168 169//**********************************************************************
4.1.5. Hypothèses de calcul et éléments finis disponibles
Cette loi est disponible pour les éléments massifs 3D et 2D sous l'hypothèse de contraintes/déformations planes (@lien vers section éléments finis?@).
De plus, elle est également applicable aux poutres à fibres (éléments finis poutre à modèle section). Dans ce dernier cas, le modèle a été implémenté dans le modèle poutre à fibres selon sa formulation 3D complète, plutôt qu'uniaxiale.
Elle peut être utilisée avec des éléments de type coque sous l'hypothèse de contraintes planes.
4.1.6. Mots clefs dans les opérateurs MODE et MATE
Exemple d'utilisation du modèle de Mazars pour des éléments finis massifs 3D CUB8 :
MODE maillage 'ELASTIQUE' 'ENDOMMAGEMENT' 'MAZARS' 'CUB8' ;
MATE modele 'YOUN' val_youn 'NU' val_nu ('RHO' val_rho)
'KTR0' val_e0 'ACOM' val_ac 'BCOM' val_bc 'ATRA' val_at 'BTRA' val_bt 'BETA' val_beta ;
Exemple d'utilisation du modèle de Mazars pour des éléments finis poutres à fibres constituée d'éléments finis TIMO dont la section est constituée d'éléments finis QUAS :
pour la section :
MODE mail_section 'ELASTIQUE' 'PLASTIQUE' 'MAZARS' 'QUAS' ;
MATE mode_section 'YOUN' val_youn 'NU' val_nu
'KTR0' val_e0 'ACOM' val_ac 'BCOM' val_bc 'ATRA' val_at 'BTRA' val_bt 'BETA' val_beta
'ALPY' 1. 'ALPZ' 1. ;
pour la poutre :
MODE mail_poutre 'ELASTIQUE' 'SECTION' 'PLASTIQUE' 'SECTION' 'TIMO' ;
MATE mode_poutre 'MODS' mode_section 'MATS' mate_section 'VECT' (0. 1. 0.) ;
4.1.7. Paramètres de la loi non linéaire
KTR0 : seuil en déformation pour la traction, \(e_0\)
ATRA : paramètre pour la traction, \(A_t\)
ACOM : paramètre pour la compression, \(A_c\)
BTRA : paramètre pour la traction, \(B_t\)
BCOM : paramètre pour la compression, \(B_c\)
BETA : correction pour le cisaillement, \(\beta\)
4.1.7.1. Valeurs typiques
Pour un béton ordinaire, on peut choisir :
\(e_0= 10^{-4}\)
\(A_t= 1\)
\(A_c= 1,5\)
\(B_t= 8000\)
\(B_c= 1550\)
\(\beta= 1\)
4.1.7.2. Prise en compte de la régularisation dans la définition des paramètres matériaux
Régularisation énergetique
Régularisation non-locale (quelle formulation? quelle variable est rendue non-locale?)
4.1.8. Anomalies observées et limitation numérique
4.1.8.1. Anomalie 1
Une anomalie a été identifiée dans les sources fibmaz.eso (modèles poutres à fibres) et cmazar.eso (modèles massifs) concernant le mauvais calibrage du test de bicompression dans le modèle de Mazars. Dans fibmaz.eso, le critère trop sévère (1.D-12) générait à tort la correction \(\gamma\) de bicompression, même lorsqu'on est en situation de traction simple ; tandis que, dans cmazar.eso, il conduisait à mal calculer les contraintes en situation de bicompression.
En ce qui concerne la source cmazar.eso pour les modèles massif, ce test à été recalibré à 1 Pa, valeur jugée suffisamment proche de 0 selon le REX (Thèse de Martin Debuisne, 2024).
Constatée le 24/07/2024.
Anomalie #12209 corrigée dans la version 2025 de Cast3M.
En ce qui concerne la source fibmaz.eso pour les modèles poutres à fibres, la correction \(\gamma\) a été inhibée car la biaxialité du chargement n'a pas de sens avec l'élément poutre à fibres qui ne traite que des chargements de type traction-compression dans la direction de sa fibre neutre et cisaillement dans le plan de sa section.
Constatée le 24/07/2024.
Anomalie #11959 corrigée dans la version 2025 de Cast3M.
4.1.8.2. Anomalie 2
Constatée le 13/06/2024.
Anomalie #11948 corrigée dans la version 2024.1 de Cast3M.
Une anomalie a été identifiée dans la source idendo.eso. Elle est datée du 21/08/2023 et cause une erreur d'initialisation du paramètre BETA dans cmazar.eso. Cette anomalie ne rend pas le modèle de Mazars inutilisable mais corrompt ses résultats avec des éléments volumiques. Elle impacte la version 2024.0 de Cast3M.
4.1.8.3. Anomalie 3
Constatée le 04/02/2025.
Non corrigée à ce jour.
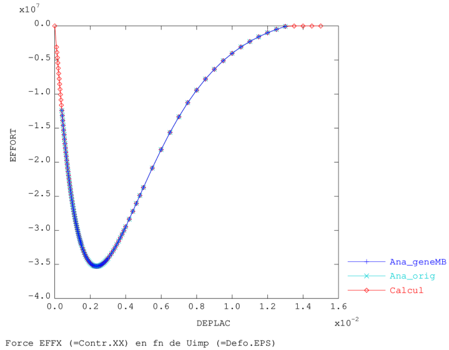
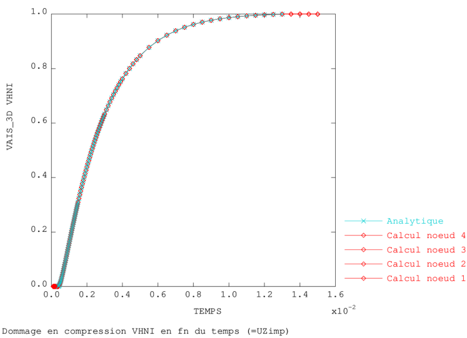
Une anomalie de fonctionnement des modélisations poutre à fibres a été identifiée dans différents cas de chargement élémentaire (traction, compression, flexion, ...) et avec différents modèles de comportement (Mazars, ACIER_UNI, ...). Il s'agit d'une instabilité numérique de type "flambement" qui conduit soit à un arrêt du calcul par non convergence de PASAPAS, soit à des résultats erronés produits après l'instabilité, comme ici un champ de dommage devenant hétérogène dans la section du modèle poutre à fibres, avec une bifurcation entre les résultats de deux paires de points de Gauss conduisant à des valeurs anormales (cf. figure ci-dessous).
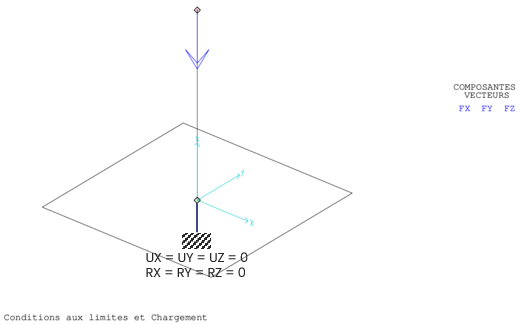
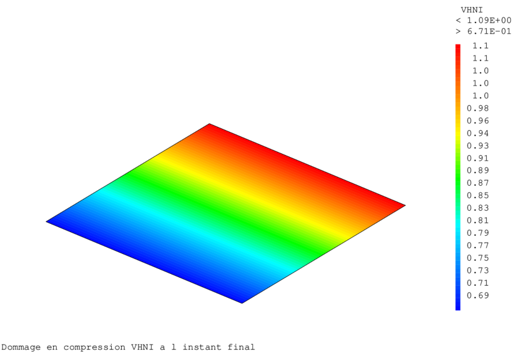
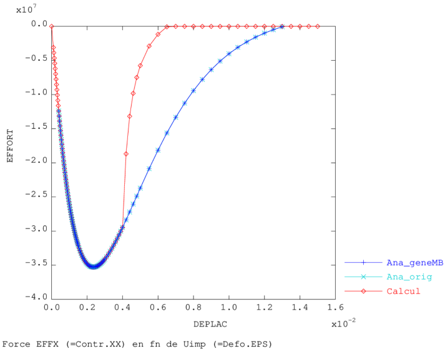
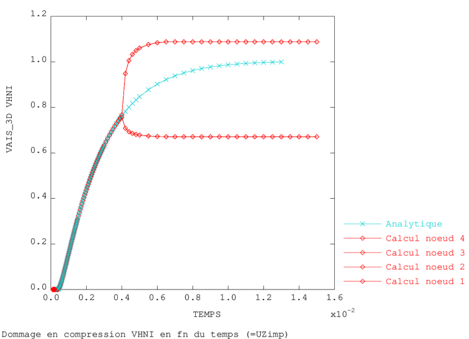
Anomalie constatée dans le cas d'une modélisation poutre à fibres soumise à un chargement uniaxial de compression en déplacement imposé à l'extrémité libre d'une poutre encastrée à son autre extrémité - Maillage et conditions aux limites, champ de dommage hétérogène dans la section en fin de calcul, évolutions anormales au cours du chargement de la contrainte moyenne en fonction de la déformation moyenne et du dommage en chaque point de Gauss de la section en fonction du temps.
Cette anomalie, qui concerne donc le modèle poutre à fibres et pas le modèle de Mazars, est contournée dans tous les cas rencontrés jusqu'ici en bloquant les rotations du point correspondant à l'extrémité libre soumise au chargement de la poutre à fibres (cf. figure ci-dessous).
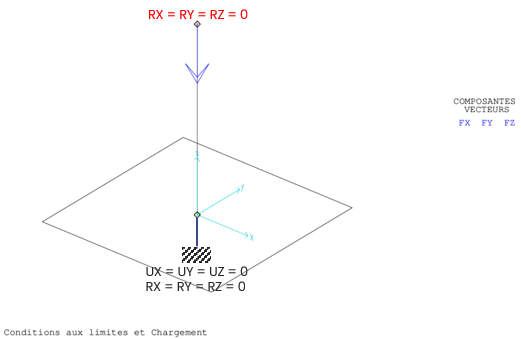
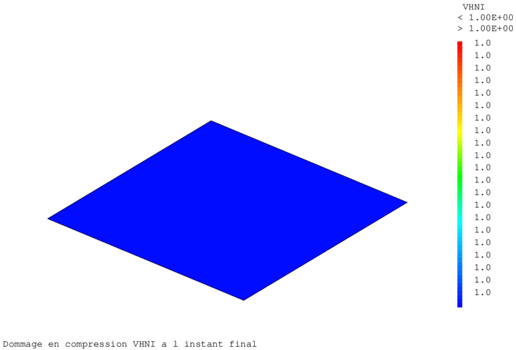
Anomalie contournée en bloquant les rotations du point d'extrémité libre de la poutre - Maillage et conditions aux limites, champ de dommage homogène en fin de calcul, évolutions normales au cours du chargement de la contrainte moyenne en fonction de la déformation moyenne et du dommage en chaque point de Gauss de la section en fonction du temps.
4.1.8.4. Limitation numérique
Le modèle de Mazars dans Cast3M, tant dans la configuration éléments volumiques (source cmazar.eso) que poutres à fibres (source fibmaz.eso), exhibe un domaine post-ruine consolidant non physique. Cet artefact numérique est dû à la limitation du dommage maximum :
où \(\epsilon\) est un paramètre arbitrairement petit, défini dans les sources Cast3M du modèle de Mazars, permettant de se prémunir de l'absence complète de rigidité aux points de Gauss ayant atteint la ruine, ce qui empêcherait la poursuite du calcul. L'augmentation de la valeur de ce paramètre est favorable à la stabilité numérique mais défavorable au réalisme de la simulation.
En effet, la consolidation qui en découlerait dans une zone jugée trop grande du modèle E.F. peut conduire à des résultats numériques qui ne sont pas physiquement admissibles et ainsi fausser le jugement du spécialiste du béton, ce qui est préjudiciable à la confiance accordée au modèle.
Le choix de la valeur du paramètre \(\epsilon\) résulte donc d'un compromis à faire entre convergence numérique et représentativité physique du modèle.
L'historique des valeurs attribuées au paramètre \(\epsilon\) est le suivant :
dans la configuration éléments volumiques (source cmazar.eso) :
\(\epsilon=10^{-20}\) : valeur d'origine ;
\(\epsilon=10^{-4}\) : valeur dans la version du jour de Cast3M jusqu'au 9/10/2024 ;
\(\epsilon=10^{-8}\) : valeur dans la version du jour de Cast3M depuis le 10/10/2024 ;
dans la configuration éléments poutres à fibres (source fibmaz.eso) :
\(\epsilon=10^{-5}\) : valeur d'origine.