suivant: Consignes monter: Objectif et rappels précédent: Solutions particuličres de l'équation Table des matières
Lorsqu'il existe une solution stationnaire ŕ un problčme transitoire et que seule cette solution nous intéresse, on peut chercher ŕ discrétiser directement les équations écrites en régime permanent ou considérer le problčme transitoire et itérer en temps jusqu'ŕ l'obtention de l'état stationnaire.
Méthode stationnaire
L'algorithme le plus naturel pour calculer la solution stationnaire d'un problčme transitoire consiste ŕ discrétiser le problčme permanent.
La discrétisation des équations conduit ŕ un systčme matriciel de
la forme ![]() . Si le problčme traité est linéaire, la
matrice
. Si le problčme traité est linéaire, la
matrice ![]() est ŕ coefficients constants. Il suffit de l'inverser
aprčs avoir imposé les conditions aux limites pour obtenir la
solution stationnaire.
est ŕ coefficients constants. Il suffit de l'inverser
aprčs avoir imposé les conditions aux limites pour obtenir la
solution stationnaire.
Dans le cas oů le problčme est non linéaire, la matrice n'est plus ŕ coefficients constants. Ceux-ci dépendent de la solution :
La convergence de la méthode vers la solution physique est souvent
problématique. Elle dépend fortement du choix du premier itéré ![]() et du
conditionnement de la matrice. Plus
et du
conditionnement de la matrice. Plus ![]() est proche de la solution cherchée
plus on a de chances de converger. Dans de nombreux cas, une initialisation
proche de la solution cherchée est impossible ce qui conduit ŕ la divergence de
la méthode. C'est pourquoi, dans le cas de problčmes non-linéaires, on
recherche l'état stationnaire en tant que limite asymptotique du problčme
instationnaire. En introduisant le temps, on modifie la nature mathématique du
problčme ce qui permet dans certains cas d'avoir un problčme mieux posé ; en
jouant sur la valeur du pas de temps le conditionnement peut ętre amélioré et
la dominance de la diagonale renforcée.
est proche de la solution cherchée
plus on a de chances de converger. Dans de nombreux cas, une initialisation
proche de la solution cherchée est impossible ce qui conduit ŕ la divergence de
la méthode. C'est pourquoi, dans le cas de problčmes non-linéaires, on
recherche l'état stationnaire en tant que limite asymptotique du problčme
instationnaire. En introduisant le temps, on modifie la nature mathématique du
problčme ce qui permet dans certains cas d'avoir un problčme mieux posé ; en
jouant sur la valeur du pas de temps le conditionnement peut ętre amélioré et
la dominance de la diagonale renforcée.
Méthode instationnaire
Supposons la solution connue au temps
![]() . On
cherche ŕ évaluer la solution de l'équation de la chaleur au temps
. On
cherche ŕ évaluer la solution de l'équation de la chaleur au temps
![]() . Suivant le temps auquel on évalue le
Laplacien de température, on obtient un schéma explicite en
temps ou un schéma implicite en temps. Nous présentons dans
cette partie ces deux schémas en utilisant une discrétisation
spatiale et temporelle par différences finies.
. Suivant le temps auquel on évalue le
Laplacien de température, on obtient un schéma explicite en
temps ou un schéma implicite en temps. Nous présentons dans
cette partie ces deux schémas en utilisant une discrétisation
spatiale et temporelle par différences finies.
Schéma explicite. Dans le cas de l'équation de la chaleur
monodimensionnelle, on obtient le schéma explicite en exprimant le
Laplacien en début de pas de temps (au temps ![]() ) :
) :
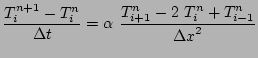
L'intéręt de la méthode explicite est évident : la solution au
temps ![]() est connue explicitement ŕ partir de la solution
au temps
est connue explicitement ŕ partir de la solution
au temps ![]() -- sans inversion d'une matrice. Le nombre
d'opérations algébriques permettant cette évaluation est donc
faible ce qui permet d'effectuer beaucoup de pas de temps ŕ
moindre coűt.
-- sans inversion d'une matrice. Le nombre
d'opérations algébriques permettant cette évaluation est donc
faible ce qui permet d'effectuer beaucoup de pas de temps ŕ
moindre coűt.
Malheureusement, pour un maillage de pas ![]() , les valeurs
de pas de temps sont limitées par le critčre de Fourier
, les valeurs
de pas de temps sont limitées par le critčre de Fourier
Schéma implicite. Dans le cas de l'équation de la chaleur
monodimensionnelle, on obtient le schéma implicite en exprimant le
Laplacien en fin de pas de temps (au temps ![]() ) :
) :
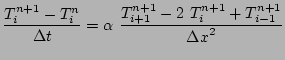
Dans le cas d'un problčme linéaire, en faisant tendre ![]() vers l'infini,
on montre qu'il suffit d'un pas de temps pour obtenir l'état stationnaire.
vers l'infini,
on montre qu'il suffit d'un pas de temps pour obtenir l'état stationnaire.
Dans le cas oů la diffusivité thermique dépend de la température, l'équation de la chaleur devient non-linéaire. La prise en compte de la non-linéarité impose un certain nombre de pas de temps avant d'atteindre la solution stationnaire. On peut linéariser le schéma en affectant ŕ la diffusivité thermique sa valeur au début du pas de temps. Le fait de figer la conductivité thermique au pas de temps précédent, dégrade la précision de la température calculée durant le transitoire. Seule la solution stationnaire vérifie l'équation et est donc ŕ considérer. Si on s'intéresse aussi au transitoire, ŕ chaque pas de temps, on doit améliorer l'évaluation du flux ce qui conduit en général ŕ utiliser une méthode de Picard.
Choix du schéma. Pour un problčme linéaire la méthode stationnaire est souvent la plus efficace.
Pour un problčme non-linéaire, le choix d'un schéma explicite ou implicite est empirique dans la mesure oů c'est l'expérience de l'utilisateur ou, ce qui est moins scientifique, ses habitudes qui prévalent. Un schéma implicite nécessite en général moins de pas de temps pour atteindre l'état stationnaire qu'un schéma explicite -- le pas de temps de ce dernier est limité par des contraintes de stabilité. Cependant, au delŕ d'une certaine taille de maillage, le coűt d'un pas de temps implicite devient plus important que le coűt d'un pas de temps explicite. La stratégie ŕ adopter est donc ŕ adapter au cas traité.
Dans tous les cas, il ne faut pas perdre de vue que la résolution d'un problčme linéaire sert en général d'étape préliminaire au traitement d'un problčme non linéaire dans lequel on a figé toutes les non-linéarités -- en négligeant la dépendance des paramčtres physiques ŕ la température par exemple. Il faut donc faire attention ŕ ne pas trop spécialiser le traitement numérique ŕ un type de problčme au risque de devoir tout refaire le jour oů on abordera le vrai problčme.